(812) 467-86-31 | info@credo-dat.ru

от 20 100 руб.
ТИМ КРЕДО 3D СКАН
Системно-технические требования для ТИМ КРЕДО 3D СКАН:
Процессор:
Intel Core i3/i5/i7 или аналогичный
ОЗУ:
не менее 8 ГБ
Жесткий диск:
для временной папки приложения и хранения текущих облаков точек рекомендуется использовать SSD
Видеоподсистема:
графический ускоритель с поддержкой OpenGL 4.3.
Операционная система:
- Astra Linux,
- РЕД ОС,
- ALT Linux,
- AlterOS,
- Microsoft Windows 10 x64,
- Microsoft Windows 11.
ТИМ КРЕДО 3D СКАН
ТИМ КРЕДО
 обработка, фильтрация и классификация облаков точек
обработка, фильтрация и классификация облаков точек
Преобразование фотограмметрических и лазерных облаков точек в цифровую модель местности (ЦММ) инженерного назначения представляет собой сложную и трудоемкую задачу. Автоматизация этого процесса значительно снижает временные затраты на обработку данных облаков точек.
Специализированный набор инструментов в новых конфигурациях ТИМ КРЕДО 3D СКАН:
ПРОГРАММА ТИМ КРЕДО 3D СКАН РЕШАЕТ СЛЕДУЮЩИЕ ЗАДАЧИ:
- Импорт и экспорт облаков точек в форматахE57, LAS, LAZ, а также текстовых файлов с настраиваемым форматом.
- Визуализация облаков точек в 3D-виде, на плоскости (2D) и в вертикальных сечениях;
- Импорт и визуализация репозиционированных фотоизображений в форматах Riegl, Leica Pegasus, АГМ-МС, CHC Alpha 3D, GreenValley, Teledyne Optech, KML, E57 вместе с облаком точек;
- Трансформация облаков точек по абсолютным и относительным опорным точкам, автоматический поиск сферических марок;
- Работа с полным облаком, выбранной областью или отдельными его слоями;
- Возможность провести измерения по облакам точек в 2D, в 3D и в поперечных разрезах;
- Фильтрация облака точек по различным значениям;
- Возможность расчета нормалей для точек облака, высоты над рельефом;
- Фильтрация шумов в облаке точек;
- Выделение (классификация) рельефа;
- Возможность создания матрицы высот по облакам точек;
- Настраиваемое прореживание облака точек и возможность построения цифровой модели рельефа (ЦМР);
- Возможность автоматического распознавания точечных и линейных объектов , с последующим созданием по ним топографических элементов;
- Автоматический поиск линий электропередачи (столбы и провода), поиск дорожных знаков с геопространственной привязкой по облаку точек;
- Возможность создавать светофоры с динамическими атрибутами (секции, стрелки) по облаку точек;
- Возможность автоматического распознавания различных объектов дорожной инфраструктуры: разметки, бровок и подошв земляного полотна, кромок покрытия, бордюров, столбов дорожных знаков, сигнальных столбиков;
- Возможность создавать растровые изображения по облакам точек;
- Интерактивное распознавание линейных объектов по растрам;
- Импорт и отображение 3D моделей в формате IFC и в популярных форматах. Измерение расстояний между узлами и ребрами 3D моделей и облаками точек в 3D окне;
- Импорт и отображение 3D триангуляционных сеток;
- Возможность расчета объемов по облакам точек;
- Создание и редактирование топографических элементов для подготовки топографических планов;
- Создание, редактирование и экспорт в DXF/DWG чертежей сечений облака точек;
- Экспорт данных цифровой модели местности (ЦММ) или цифровой модели рельефа (ЦМР) в форматах: DXF, DWG, TopoXML (LandXML), MIF/MID и текстовых файлов с настраиваемым форматом;
- Экспорт элементов организации дорожного движения в формате TopoXML.
ПОДГОТОВКА ИСХОДНЫХ ДАННЫХ
Работа в программе начинается с этапа сбора исходных данных. Информация об облаке точек может быть получена в различных форматах: поддерживаются LAS, LAZ, E57, а также возможен импорт из текстовых файлов с настройкой формата. Процесс импорта облаков точек позволяет гибко и удобно просматривать данные, исправлять ошибки габаритов облака и корректно интерпретировать координаты (рис. 1). Дополнительно можно загружать фотоизображения и панорамы с геопространственной привязкой к области, занимаемой облаком точек. Фотоизображения можно просматривать в отдельном окне (окно фотоизображений полностью синхронизировано с камерой 3D-окна) или в режиме совмещенного просмотра в 3D-окне. При работе в плане и 3D можно выбрать определенную фотографию для определения характеристик объекта при отрисовке ситуации.
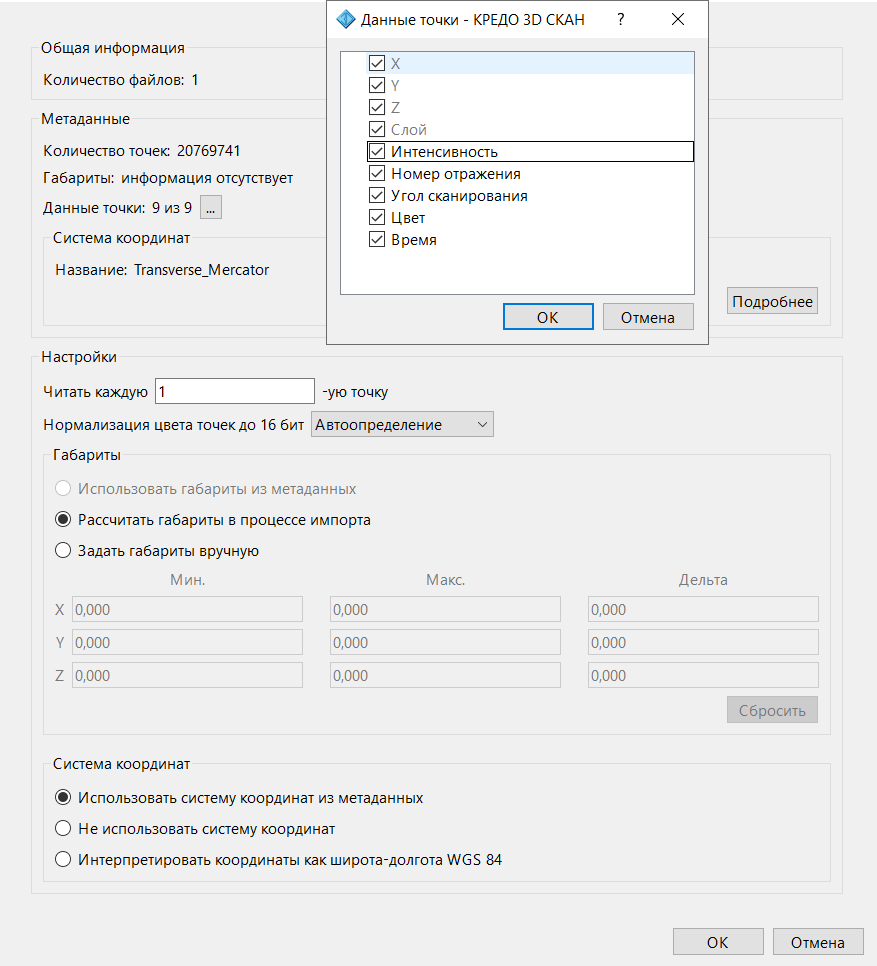
Рис. 1. Импорт облаков точек в системе КРЕДО 3D СКАН.
Для более полного восприятия и удобства можно переключиться на трехмерный вид в 3D-окне и продолжить работу (рис. 5). Перемещение в 3D-окне осуществляется интерактивно по всем направлениям с помощью колеса мыши, правой или левой кнопки. Программа поддерживает два полноценных 3D окна, что позволяет удобно работать со сложными объектами, видя их одновременно с разных сторон и сверху (в окне "План").
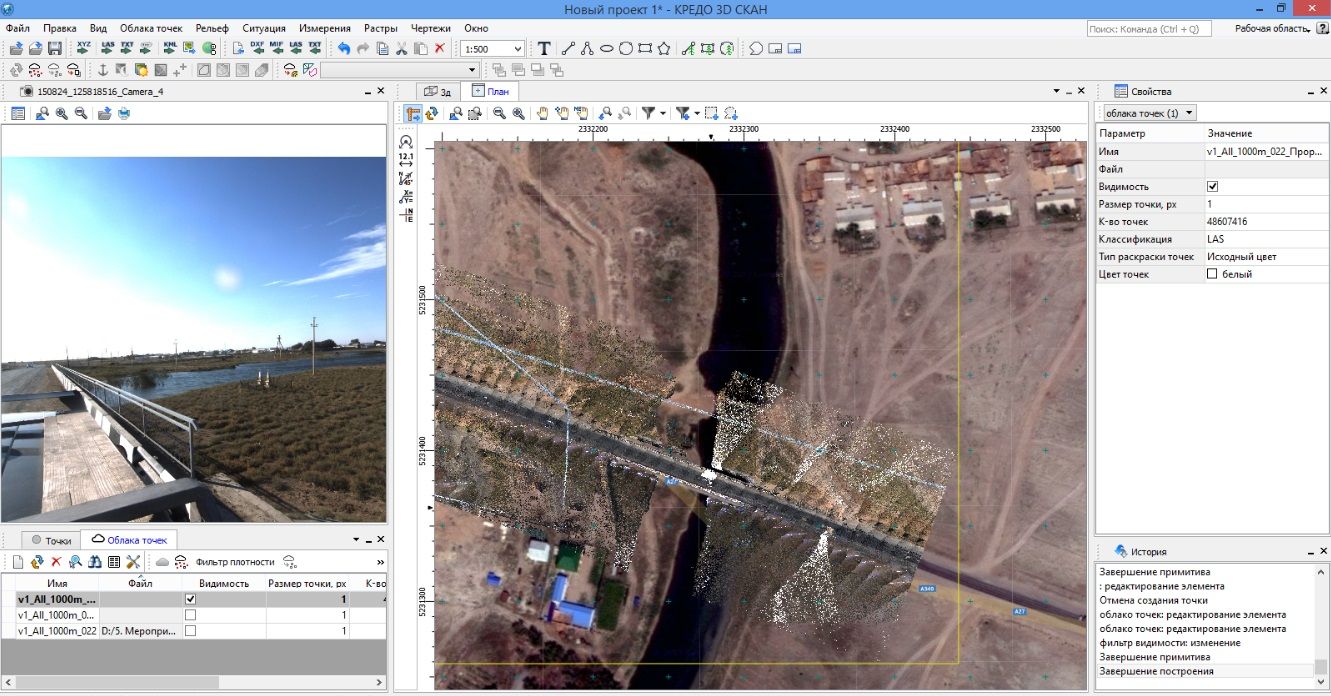
Рис. 2. Работа с облаком точек, веб-картами, фотоматериалами в системе КРЕДО 3D СКАН.
Перед загрузкой данных в программу ТИМ КРЕДО 3D СКАН можно настроить все параметры проекта в одном окне. Доступны настройки классификатора топографических объектов, выбор системы координат, вариант отображения объектов на плоскости и единицы измерения. Программа также позволяет импортировать системы координат из базы данных EPSG, а для удобства поиска объектов в базе предусмотрен графический интерфейс (рис. 3).
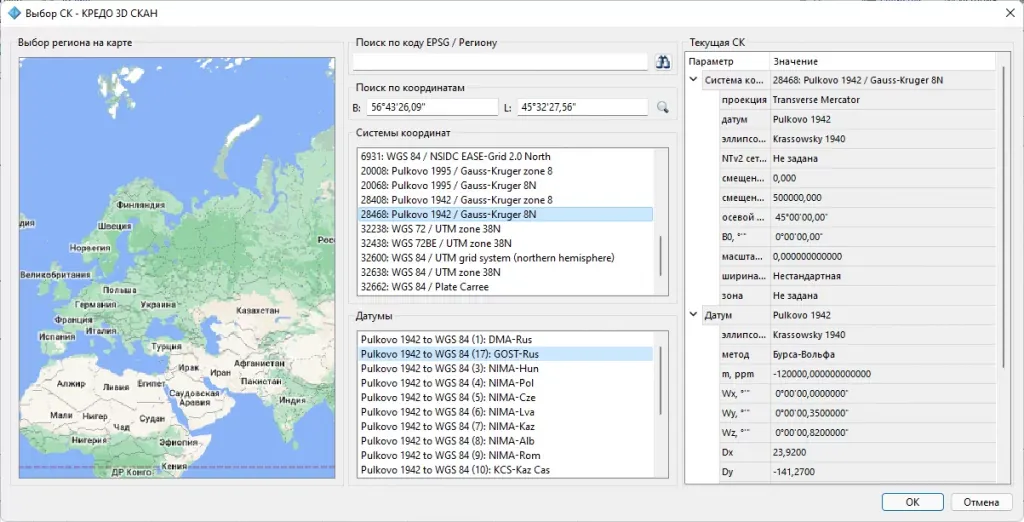
Рис. 3. Поиск систем координат в базе данных EPSG.
После импорта облако точек отображается в 2D-виде в окне "План", где можно проанализировать загруженные данные на плоскости. Для удобной работы с 3D-облаком в окне "План" предусмотрена возможность визуализации динамического поперечного сечения, которое строит разрез в 3D виде (включая облака точек, матрицы высот и отображаемые в трехмерном виде объекты). Окно отображает поперечное сечение по нормали к заданной линии под курсором в окне "План".
Также можно построить поперечное сечение, указав линию сечения в окне "План". Текущее поперечное сечение можно заблокировать, что позволит выполнить различные измерения, создавать и редактировать точечные и линейные объекты, включая линии, пересекающие поперечное сечение. Предоставлена возможность распознавания линий по облаку в поперечном сечении и экспорт полученного чертежа в форматы DXF/DWG. При необходимости можно настроить ширину сечения и вертикальный масштаб. Перемещение положения поперечного сечения происходит интерактивно по положению курсора в окне "План" или с помощью команд перемещения при заблокированном поперечном сечении (для перемещения настраивается большой и малый шаг). При использовании оси дороги в качестве опорной линии в окне поперечного сечения отображается текущее пикетное положение.
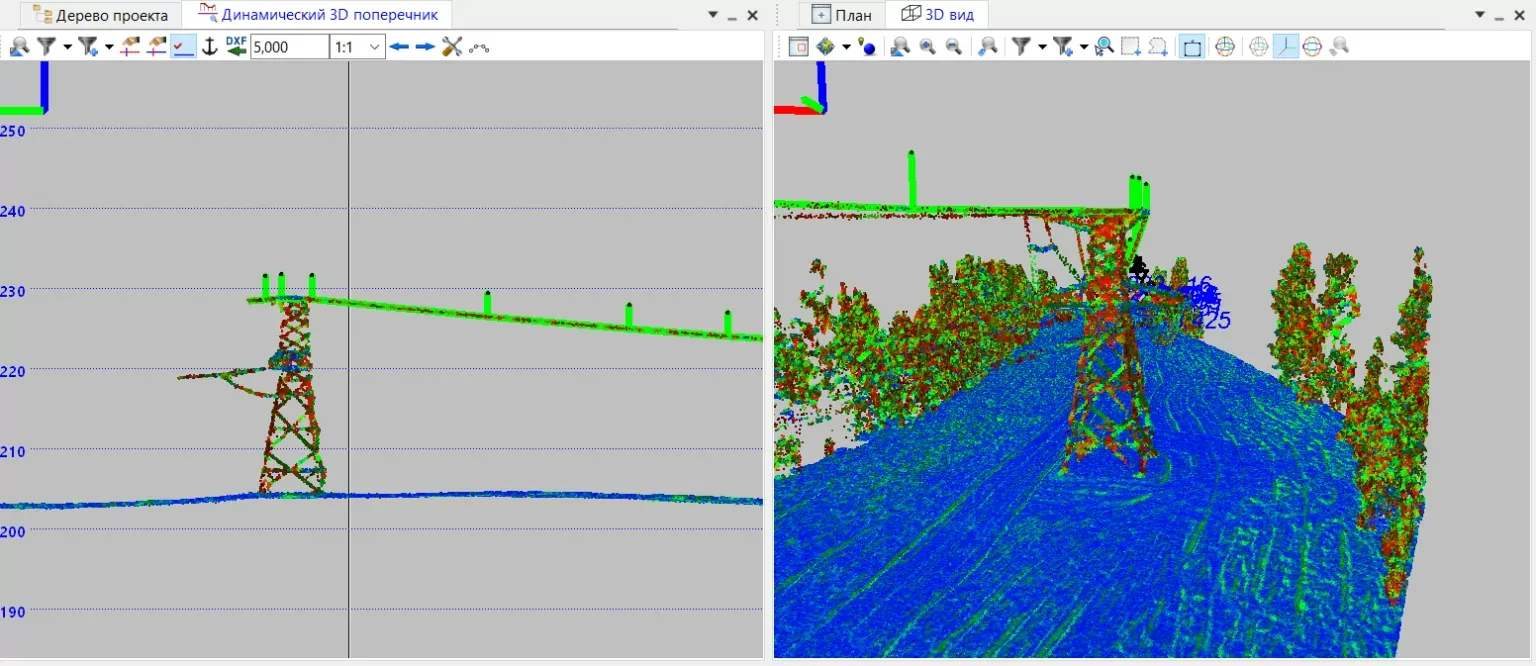
Рис. 4. Динамический поперечник по облаку.
Для более полного восприятия и удобства можно переключиться на трехмерный вид в 3D-окне и продолжить работу (рис. 5). Перемещение в 3D-окне осуществляется интерактивно по всем направлениям с помощью колеса мыши, правой или левой кнопки. Программа поддерживает два полноценных 3D окна, что позволяет удобно работать со сложными объектами, видя их одновременно с разных сторон и сверху (в окне "План").
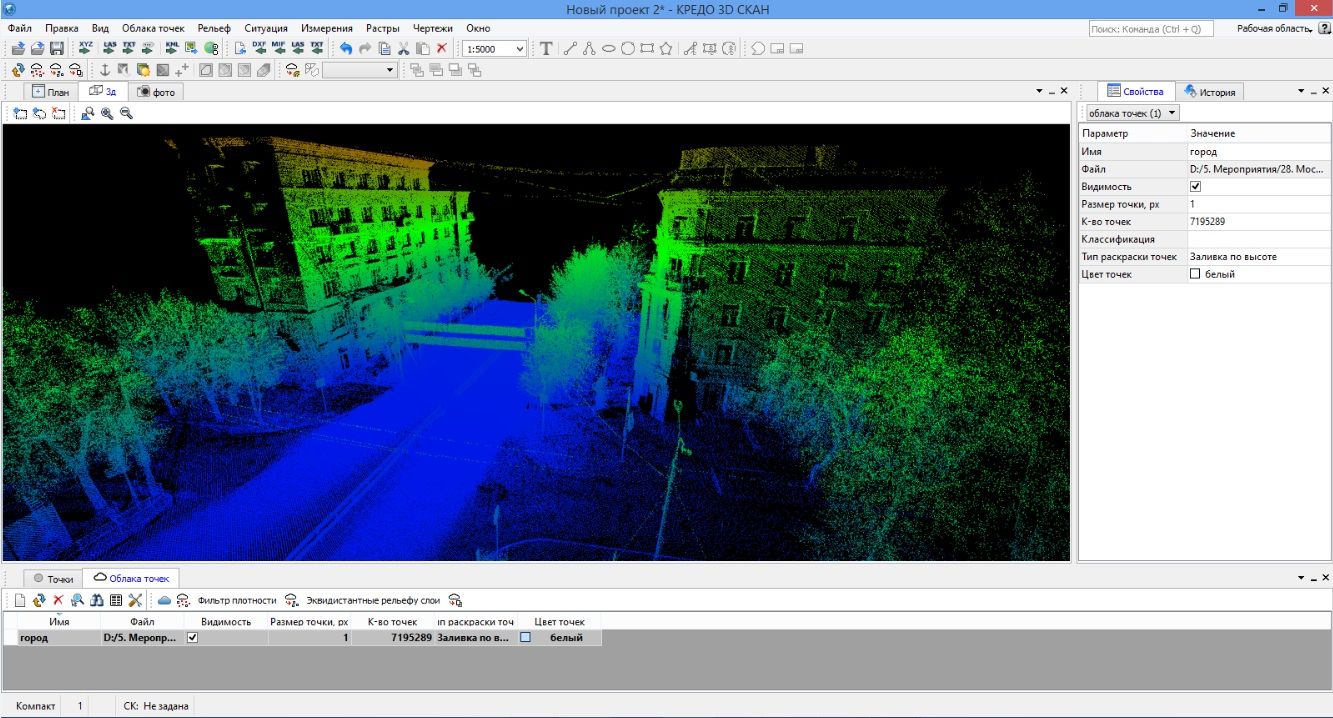
Рис. 5. Работа с облаком точек в 3D-окне.
В рамках одного проекта фильтры могут применяться как ко всему облаку точек, так и к отдельным его частям (в заданном контуре, к выделенным точкам, к отдельным классификационным слоям или к точкам, определенным составными логическими и геометрическими условиями). Указание контура можно выполнять как в 3D, так и в 2D. В качестве контура может использоваться линейный объект. При запуске фильтров можно включить предпросмотр заданных условий и визуально оценить, к каким точкам будет применен фильтр.
Для большинства алгоритмов предусмотрена визуализация параметров и геометрических ограничений, что обеспечивает наглядность при редактировании параметров (рис. 6).
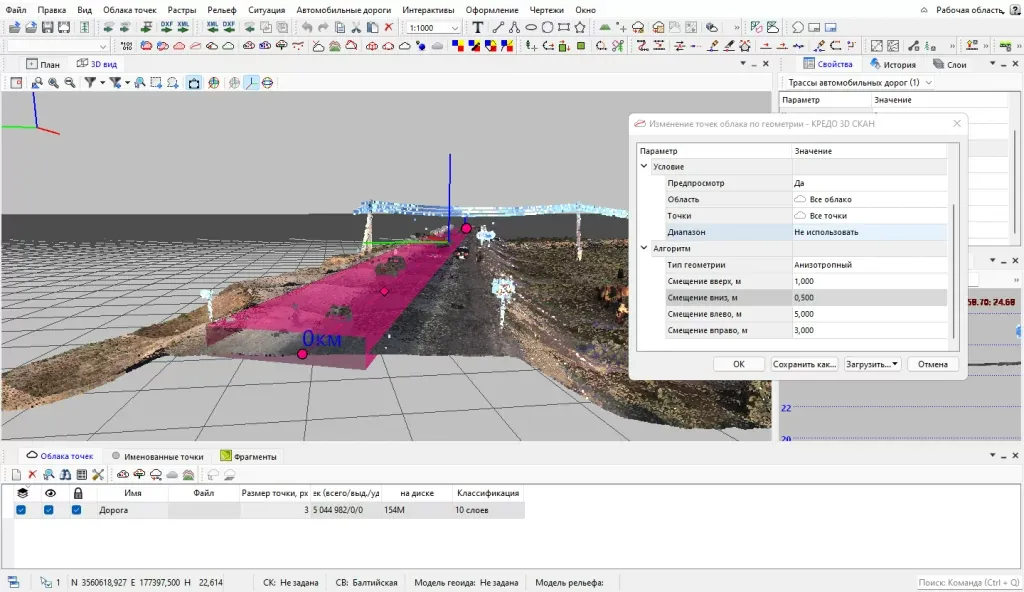
Рис. 6. Визуализация параметров.
Модификация точек в кластере является удобным инструментом, который позволяет быстро классифицировать или удалить изолированные группы точек.
Для классификации частей зданий и сооружений программа предоставляет функционал работы с плоскими сегментами. Плоские сегменты создаются в интерактивном режиме по плоским отсканированным участкам, таким как стены, крыши, полы и т.д. В дальнейшем точки облака можно модифицировать по расстоянию от выбранного плоского сегмента, например, назначить слои точкам облака, относящимся к элементам здания.
Также возможно объединить (сшить) несколько облаков точек в одном проекте. Также можно применять смещение в 2D по осям (dX, dY) или по высоте (dH).
ТРАНСФОРМАЦИЯ ОБЛАКОВ ТОЧЕК
В некоторых случаях сущевтует необходимость обработки облаков точек: для сшивки сканов с разных приборов,видов, для обработки данных наземного сканирования, для обработки облака с учетом марок с известными координатами или для взаимной корректировки двух облаков.
КРЕДО 3D СКАН предоставляет возвожности по трансформации облаков: импорт и указание на облаках опорных точек, осущетсвление привязки опорных точек к центрам сферических марок, тобработка отдельных облаков и всех облаков проекта, включая возможность обработки по относительным точкам привязки – точкам без известных координат, положение которых известно на нескольких облаках. Точки привязки могут создаваться как 2D, так и в 3D. Обработка осуществляется кусочно-линейным методом, что позволяет устранять нелинейные искажения отдельных облаков или выполнять взаимную обработку нескольких облаков с учетом возможных невязок положения марок. В программе также реализован функционал точной финальной обработки облаков алгоритмом ICP.
ПРЕОБРАЗОВАНИЕ ОБЛАКА ТОЧЕК В ЦИФРОВУЮ МОДЕЛЬ РЕЛЬЕФА (ЦМР)
Программа позволяет в полуавтоматическом режиме создавать цифровую модель рельефа (ЦМР). Для этого необходимо выполнить несколько действий:
- Отфильтруйте шумы ниже уровня рельефа.
- Проведите классификацию рельефа. Программа поддерживает несколько способов классификации для различных облаков точек и типов местности. Можно как классифицировать рельефные точки, отнеся их к слою рельефа, так и создать новое облако с рельефными точками. Для фотограмметрических облаков точек предусмотрена функция удаления нерельефных объектов, которые плохо поддаются автоматической классификации, в интерактивном режиме, указывая опорный контур по рельефу по периметру объекта. При необходимости тонкой фильтрации твердых поверхностей (например, проезжей части) можно выполнить дополнительную фильтрацию рельефа для таких участков с помощью порогового фильтра по коэффициенту нерельефности с возможностью предпросмотра результата.
- Оставшиеся после автоматической классификации объекты, не относящиеся к рельефу, можно устранить вручную (удалением отдельных точек и групп точек). Также есть возможность рассчитывать нормали и выполнять их обработку по значению уклона, устраняя некорректно классифицированные объекты.
- Выполняя работу с моделью рельефа, можно создавать матрицу высот по рельефному облаку точек (по слою рельефа облака точек), а также интерполировать её, при необходимости. Матрицы высот можно использовать в качестве эффективной модели рельефа или для оценки качества выделенного рельефа.
- Проведите прореживание полученного облака точек в зависимости от требований к цифровой модели рельефа (максимальное расстояние между точками на плоских участках, минимальный отображаемый размер микроформ рельефа). Как результат, будет создано облако, содержащее число точек, сопоставимое с числом пикетов при инструментальной топографической съемке.
- По прореженным (каркасным) точкам облака постройте поверхность. При необходимости настройте параметры отображения цифровой модели рельефа (шаг горизонталей, подписи и т. п.).
Интеграция данных традиционных съёмок существенно повышает точность и эффективность моделирования рельефа. Импортированные точки, отображаемые в окне «План», таблице «Именованные точки» и 3D-окне, служат эталоном для оценки качества сканирования и корректировки геометрической модели. Визуализация совмещённого облака точек и импортированных данных в 3D-пространстве обеспечивает быстрый и наглядный анализ пригодности облака для последующего моделирования. Алгоритмы выделения рельефа, используемые программой, опираются на модельные точки (как импортированные, так и созданные внутри программы), что гарантирует высокую точность определения элементов рельефа. При импорте автоматически обрабатываются полевые коды и команды, формируя соответствующие топографические объекты.
Автоматизированное построение структурных линий по бровкам значительно ускоряет процесс моделирования. Программа автоматически распознает линии перегиба рельефа для бровок и подошв земляного полотна дорог, а также бровок на уступах карьеров. Для остальных случаев предусмотрены интуитивно понятные инструменты, оптимизирующие ручное построение линий и обеспечивающие высокое качество результата. Градиентная раскраска по уклону обеспечивает наглядное представление зон с различными углами наклона. Трехмерная визуализация матрицы высот, сгенерированной по облаку точек, позволяет детально анализировать особенности рельефа. Динамически обновляемый поперечный профиль, отображаемый в соответствии с положением курсора на плане, обеспечивает точное позиционирование линий в характерных точках перегиба.
Расчет объемов земляных работ выполняется на основе модели рельефа и точек рельефа облака. Исходное состояние рельефа используется в качестве базовой модели, а конечное состояние определяется облаком точек. Результатом расчета является отчет, содержащий значения объемов насыпи и выемки, соответствующие площади, а также картограмму в виде растра.
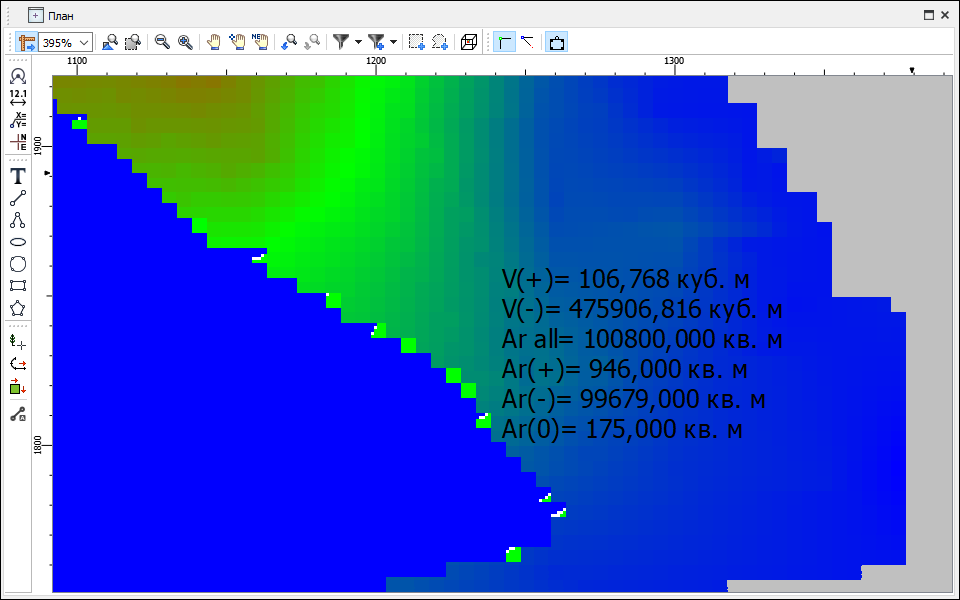
Рис. 7. Результат расчета объемов.
Создание топографических объектов интуитивно понятно как в 2D-проекции (окно «План»), так и в 3D-среде. Пользователь может начать создание объекта в одном окне и продолжить в другом, выбрав наиболее удобное представление для отрисовки. Такой подход значительно упрощает работу со сложными линейными и полигональными объектами. После выбора области интереса в облаке точек открывается классификатор, позволяющий выбрать необходимый тип топографического объекта. Созданный объект отображается синхронно в обоих окнах. Объекты, созданные в окне «План» на основе заданной модели рельефа, автоматически получают высотные отметки из этой модели. В качестве модели рельефа может выступать облако точек (после фильтрации нерельефных точек или использования классификационного слоя), триангуляционная поверхность или матрица высот.
Для повышения эффективности работы в 3D-среде предусмотрена возможность одновременного использования привязанного фотоизображения, охватывающего область облака точек. Это обеспечивает наглядность и удобство при создании и редактировании объектов. (рис. 8).
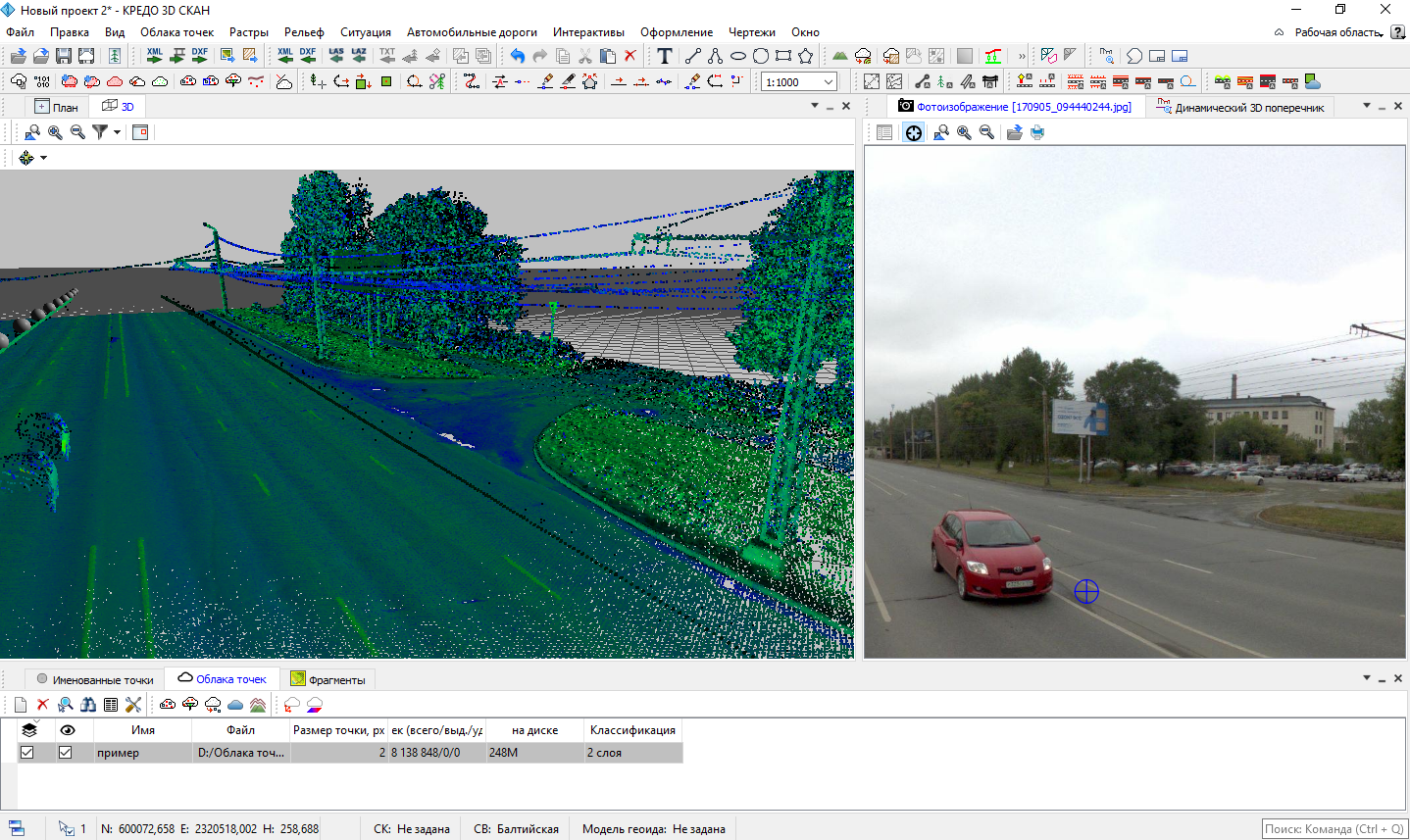
Рис. 8. Окно 3D-вида и окно фотографий.
Встроенные алгоритмы автоматического построения цифровой модели местности (ЦММ) на основе облака точек значительно повышают эффективность работы.
Автоматическое распознавание линий электропередачи осуществляется в два этапа. Сначала происходит автоматическое определение опор с последующей интерактивной проверкой результатов. На втором этапе восстанавливается геометрия проводов с возможностью создания как отдельных проводов, так и единого линейного объекта, представляющего всю линию электропередачи (рис. 9).
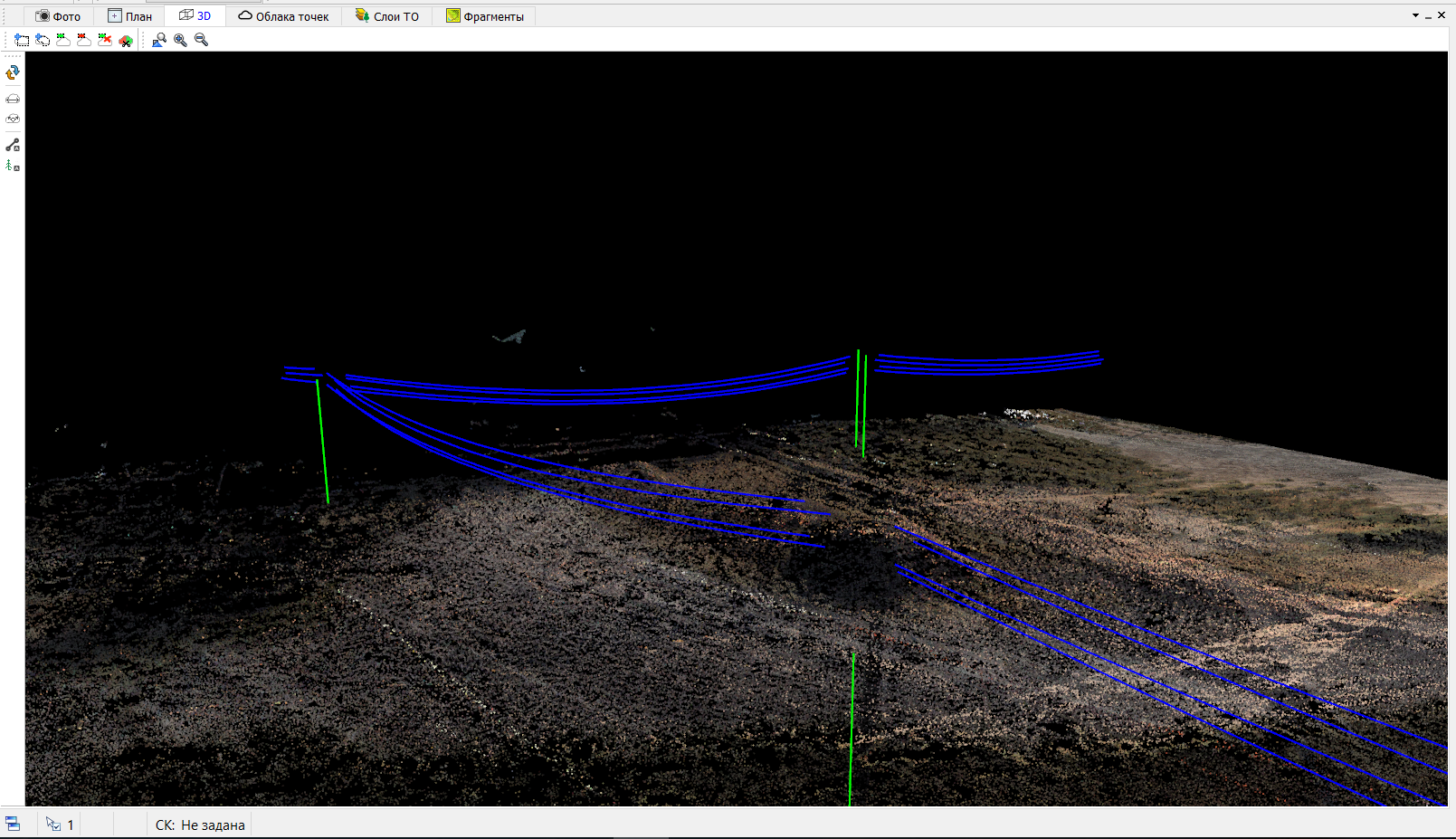
Рис. 9. Распознавание ЛЭП.
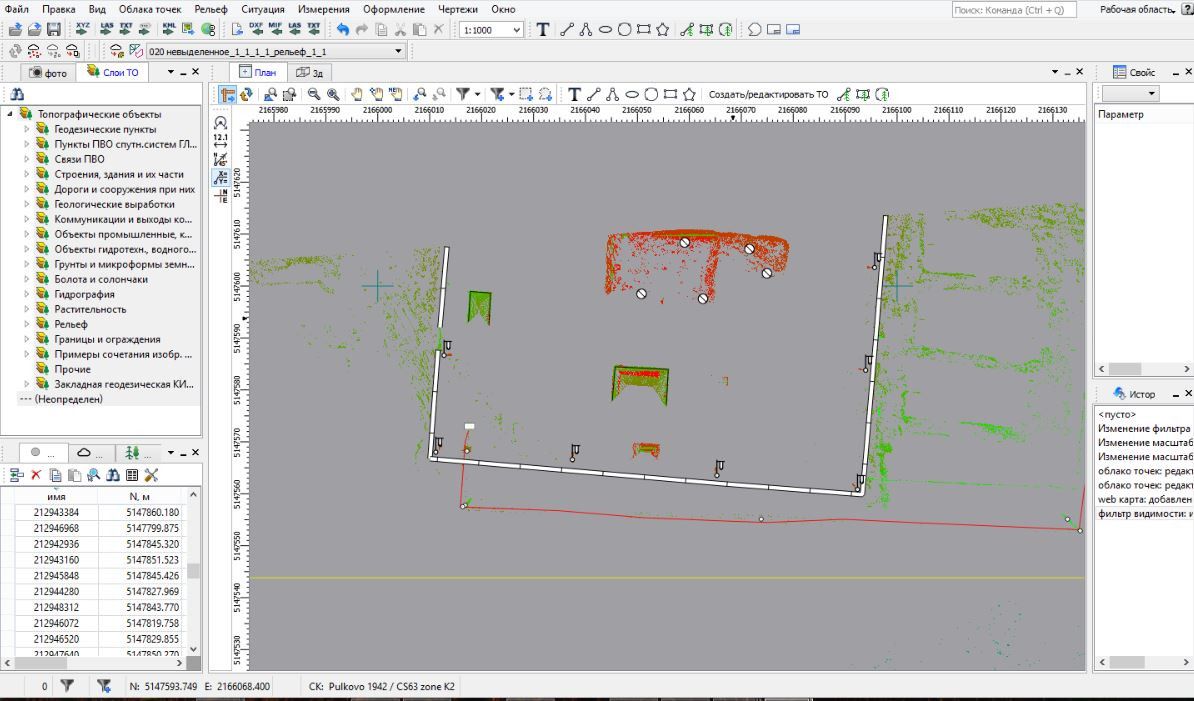
Рис. 10. Отображение в окне ПЛАН распознанных топографических объектов.
СОЗДАНИЕ И РАСПОЗНАВАНИЕ ЭЛЕМЕНТОВ ДОРОГИ И ОБЪЕКТОВ ОРГАНИЗАЦИИ ДОРОЖНОГО ДВИЖЕНИЯ ПО ОБЛАКУ ТОЧЕК
Программа автоматизирует распознавание элементов дорожной инфраструктуры, включая дорожную разметку (на основе анализа интенсивности движения), опоры дорожных знаков, сигнальные столбики, бровки и подошвы земляного полотна, кромки дорожного покрытия (при наличии существенного перепада высот с обочиной) и бордюры. Для повышения точности и автоматизации процесса распознавания поддерживается импорт данных о траектории мобильного сканера, что позволяет предварительно определить предполагаемое положение проезжей части. (рис. 11).
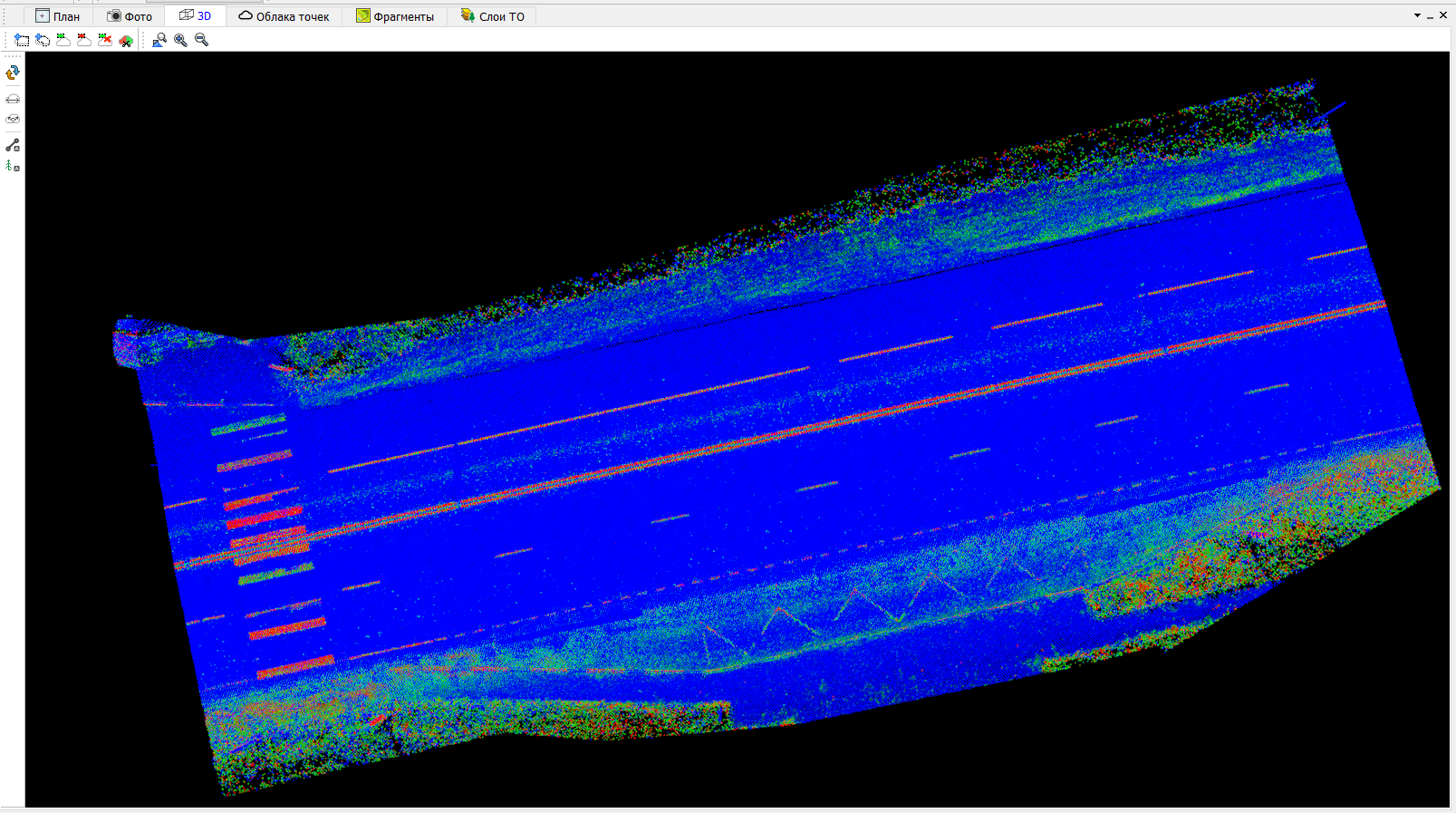
Рис. 11. Распознавание элементов дорожной инфраструктуры.
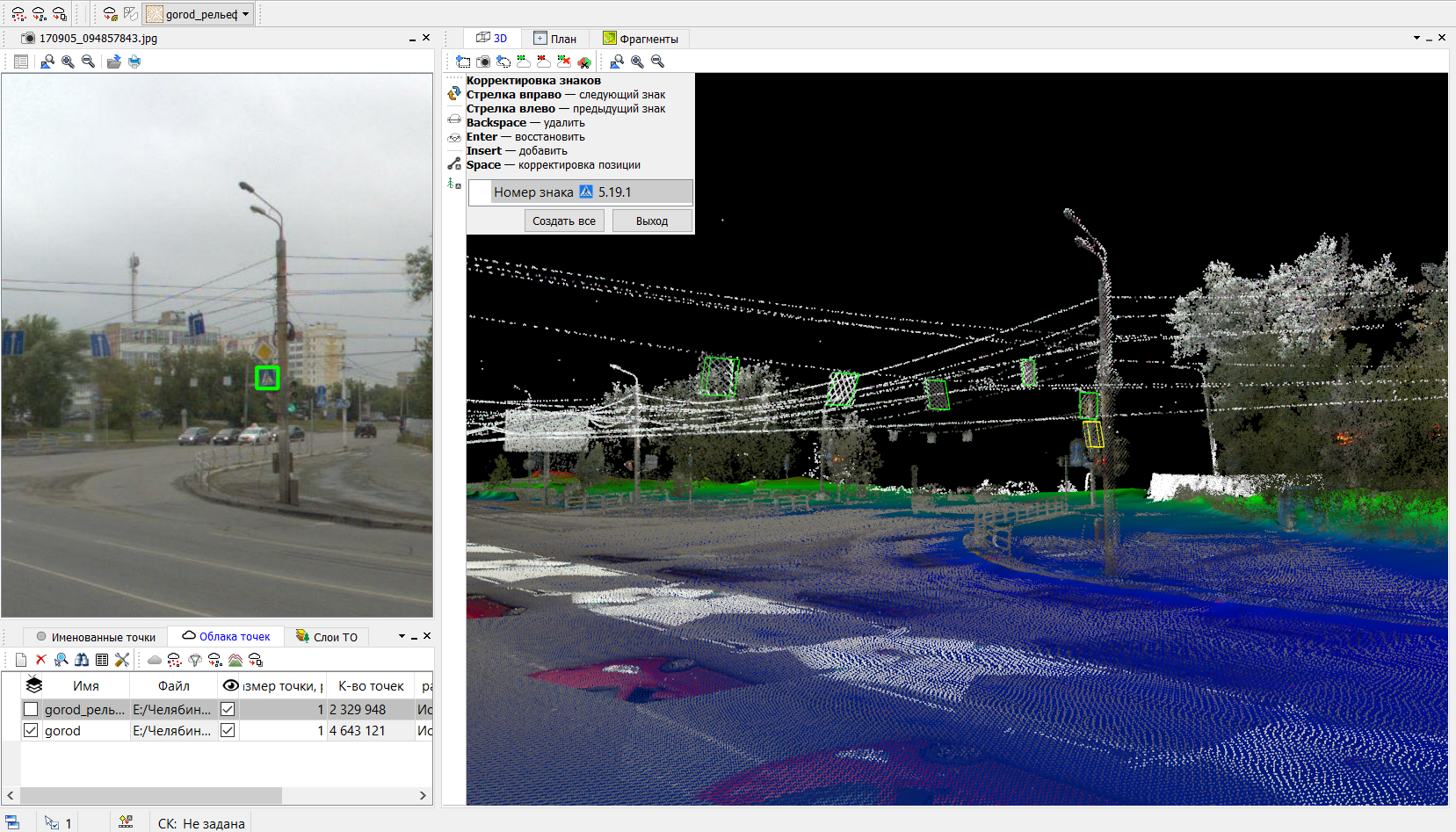
Рис. 12. Распознавание дорожных знаков.
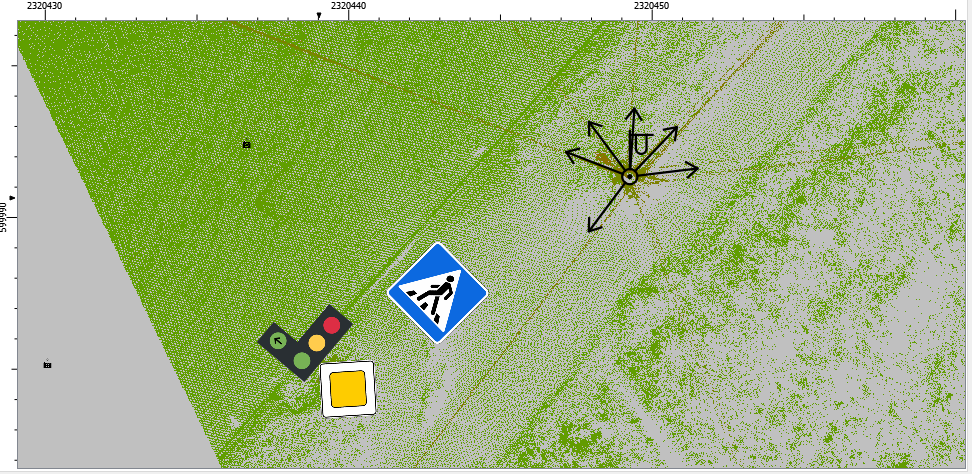
Рис. 13. Создание средств организации дорожного движения.
Программа позволяет проводить анализ состояния дороги на основе данных лазерного сканирования, включая расчёт индекса ровности IRI с генерацией отчёта и графика, а также анализ дефектов дорожного покрытия (колеи, выбоины, состояние обочин) с графическим отображением результатов. Кроме того, предусмотрена функция расчёта уклонов дорожного полотна по облаку точек с заданным пользователем шагом.
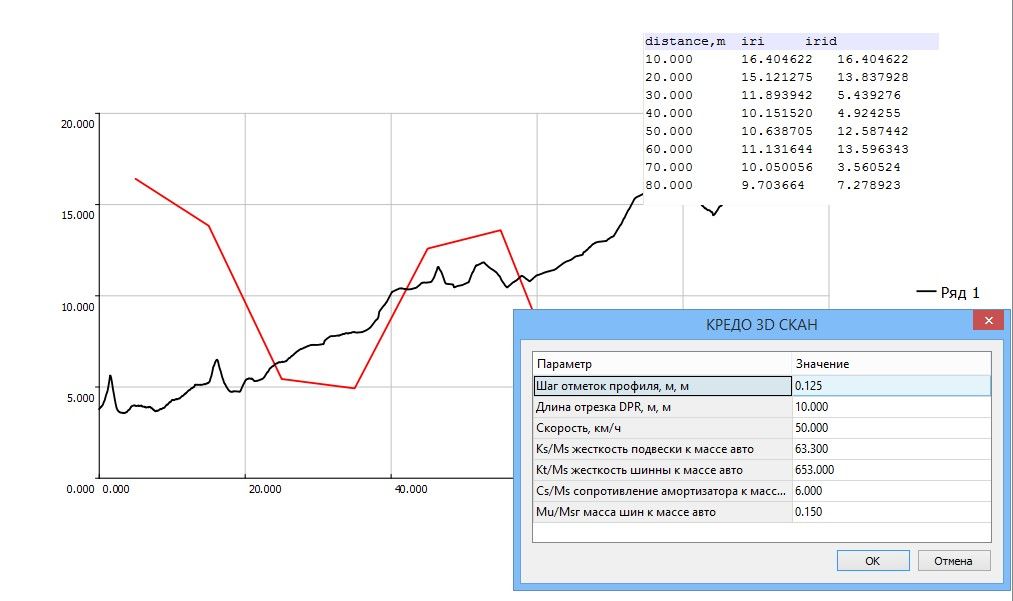
Рис. 14. Расчет ровности.
Программа реализует автоматизированный поиск линий излома рельефа и построение соответствующих векторных структурных линий. Многоэтапный процесс поиска позволяет на каждом шаге оценивать качество результатов и корректировать параметры алгоритма для достижения оптимального результата. Финальный этап выделения бровок обеспечивает интерактивное управление параметрами с возможностью предварительного просмотра результатов. Для повышения точности результата предусмотрены функции фильтрации бровок по длине (для удаления шумов и незначительных элементов) и автоматической стыковки однотипных фрагментов.
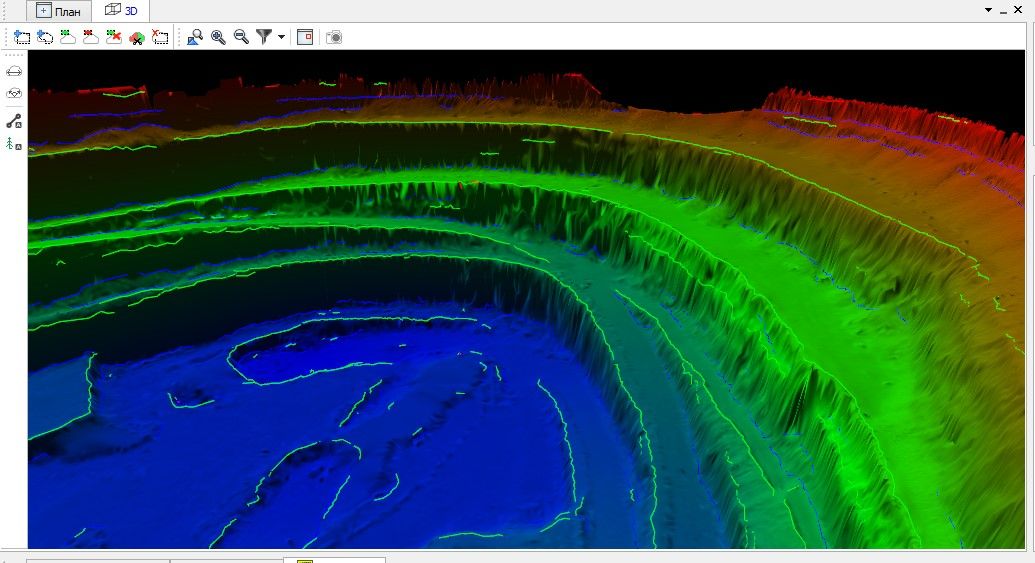
Рис. 15. Распознавание бровок уступов карьера.
СОЗДАНИЕ СХЕМ И АННОТИРОВАНИЕ ОБЛАКОВ
Программа поддерживает создание гибко настраиваемых подписей объектов как в 2D-проекции (план), так и в 3D-виде, с привязкой к объектам и точкам облака. Пользователи могут создавать собственные шаблоны подписей и использовать множество параметров, включая координаты, расстояния, превышения, разности координат и характеристики элементов модели. Часто используемые шаблоны подписей можно сохранить для повторного применения.
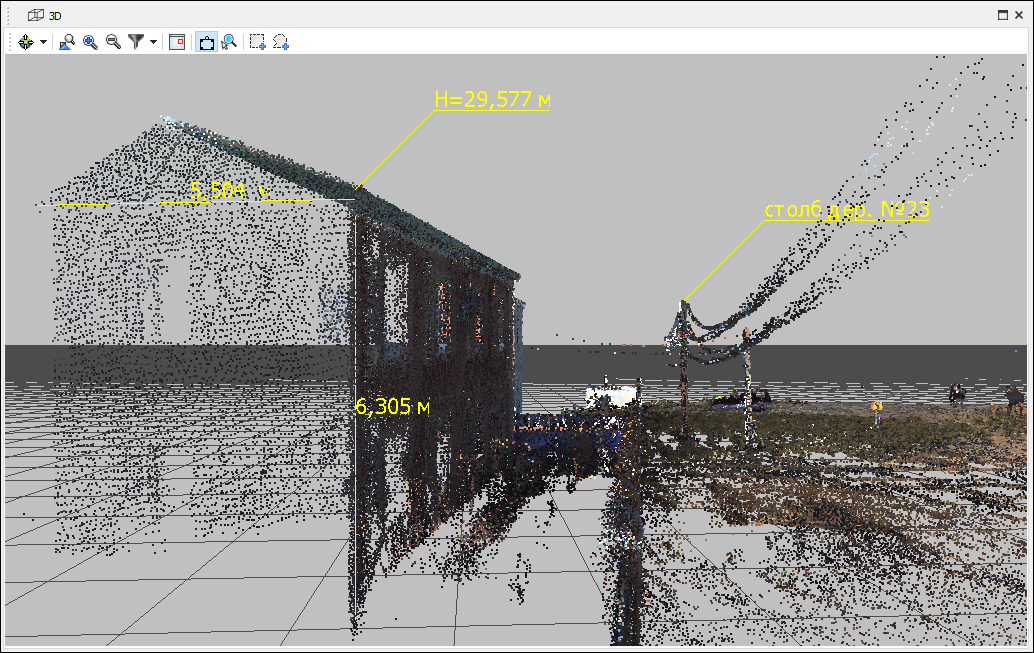
Рис. 16. Подписи в 3D-окне.
Программа ТИМ КРЕДО 3D СКАН предоставляет базовые инструменты для работы с 3D-моделями. Поддерживается импорт моделей в формате IFC (Industry Foundation Classes), а также других распространенных 3D-форматов. Программа позволяет совмещать импортированные 3D-модели с облаками точек в 3D-окне, перемещать и масштабировать их, а также измерять расстояния между точками облака и узлами 3D-модели.
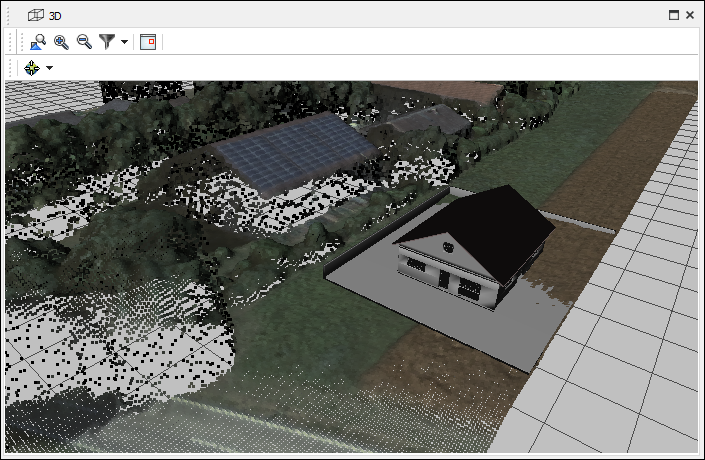
Рис. 17. Совместная работа с облаками точек и 3D моделями.
Генерация чертежей является неотъемлемой частью работы программы. Пользователь может выбрать произвольную область для создания чертежа, задав его конфигурацию или размер листа. Созданный чертеж можно отправить на печать или сохранить в различных форматах файлов.
Результаты обработки данных облаков точек экспортируются в следующих форматах: DXF, MIF/MID, LAS, LAZ, TopoXML (LandXML), а также в различных растровых форматах.
ПРЕИМУЩЕСТВА ОБРАБОТКИ ДАННЫХ ЛАЗЕРНОГО СКАНИРОВАНИИ В ТИМ КРЕДО 3D СКАН
ТИМ КРЕДО 3D СКАН — это программное решение, автоматизирующее обработку данных фотограмметрии и лазерного сканирования для создания цифровых моделей местности, включающих модели рельефа и ситуации. Программа предназначена для решения широкого спектра инженерных задач, в том числе оценки состояния дорог и моделирования дорожной инфраструктуры, а также средств организации дорожного движения. Интуитивно понятный интерфейс и возможности автоматизации обработки данных обеспечивают высокую производительность и качество результатов. ТИМ КРЕДО 3D СКАН является частью геодезического направления программного комплекса КРЕДО и позволяет интегрировать данные, полученные различными методами инженерно-геодезических изысканий, в единую информационную среду для достижения максимальной эффективности и точности.
г. Санкт-Петербург, п-к Луначарского, д. 15, к. 1, пом. 267Ж | (812) 467-86-31 |
info@credo-dat.ru